ລາຍລະອຽດຜະລິດຕະພັນ
ປ້າຍກຳກັບສິນຄ້າ
130 ຊຸດຂອງມໍເຕີ servo:
| ແຮງບິດອັນດັບ (Nm) | 4 | 5 | 6 | 7.7 | 10 | 10 | 10 | 15 | | | ຕົວແບບ | 130-04025 | 130-05025 | 130-06025130-07725 | 130-10010 | 130-10015 | 130-10025 | 130-15015 | 130-15025 | | ໃຫ້ຄະແນນພະລັງງານ (kW) | 1.0 | 1.3 | 1.5 | 2.0 | 1.0 | 1.5 | 2.6 | 2.3 | 3.8 | | ອັນດັບປັດຈຸບັນ (A) | 4.0 | 5.0 | 6.0 | 7.5 | 4.5 | 6.0 | 10 | 9.5 | 13.5 | | ສູງສຸດແຮງບິດ (Nm) | 12 | 15 | 18 | 22 | 20 | 25 | 25 | 30 | 30 | | ໃຫ້ຄະແນນຄວາມໄວ (r/ນາທີ) | 2500 | 2500 | 2500 | 2500 | 1000 | 1500 | 2500 | 1500 | 2500 | | ໂຣເຕີInertia (Kg ■ m2) | 0.85 X10-3 | 1.06 X10-3 | 1.26 X10-31.53 X10-3 | 1.94X10-3 | 1.94X10-3 | 1.94 X10-3 | 2.77 X10-3 | 2.77X10-1 | | ແຮງບິດຄ່າສຳປະສິດ(Nm/A) | 1.0 | 1.0 | 10 | 1.03 | 2.2 | 1.67 | 1.0 | 1.58 | 1.11 | | ເຄົາເຕີEMF(V/1000r/ນາທີ) | 72 | 68 | 65 | 68 | ໑໔໐ | 103 | 70 | ໑໑໔ | 67 | | ບາດແຜສາຍ (Q) | 2.76 | 1.84 | 1.21 | 1.01 | 27 | 1.5 | 0.73 | 1.1 | 0.49 | | ສາຍ inductance(ມຊ) | 6.42 | 4.9 | 3.87 | 2.94 | 8.8 | 4.37 | 2.45 | 2.45 | 1.68 | | ເວລາໄຟຟ້າຄົງທີ່(Ms) | 2.32 | 2.66 | 3.26 | 2.91 | 3.26 | 2.91 | 3.36 | 4.05 | 3.43 | | ນ້ຳໜັກ (Kg) | 6.2 | 6.6 | 7.4 | 8.3 | 10.2 | 10.2 | 9.8 | 12.6 | 11.7 | | ແຮງດັນຂາເຂົ້າຂອງໄດເວີ M | AC220V | | ຈຳນວນຕົວເຂົ້າລະຫັດ (P/R) | 2500 / ປະເພດຢ່າງແທ້ຈິງ 17bit | | ເສົາ-ຄູ່ | 4 | | ຊັ້ນ insulation | F | | ສະພາບແວດລ້ອມ | ອຸນຫະພູມ: -20°C~+40°C ຄວາມຊຸ່ມຊື່ນ: ພີ່ນ້ອງ^90% | | ຫ້ອງຮຽນປົກປ້ອງ | IP65 | |
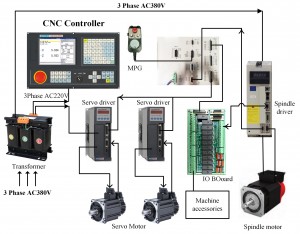
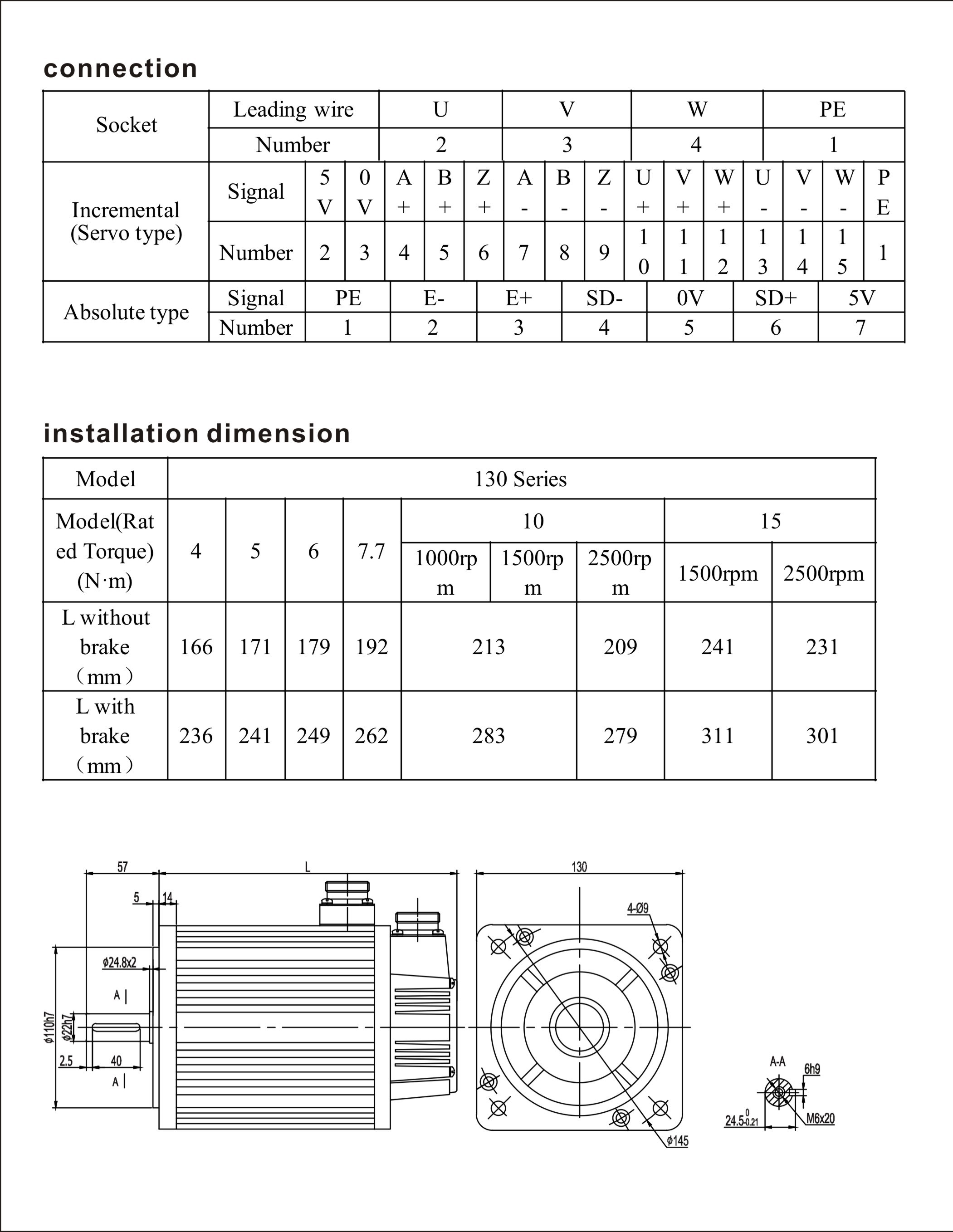
ການເຊື່ອມຕໍ່:
| ແຮງບິດອັນດັບ (Nm) | 4 | 5 | 6 | 7.7 | 10 | 10 | 10 | 15 | |
| ຕົວແບບ | 130-04025 | 130-05025 | 130-06025130-07725 | 130-10010 | 130-10015 | 130-10025 | 130-15015 | 130-15025 |
| ໃຫ້ຄະແນນພະລັງງານ (kW) | 1.0 | 1.3 | 1.5 | 2.0 | 1.0 | 1.5 | 2.6 | 2.3 | 3.8 |
| ອັນດັບປັດຈຸບັນ (A) | 4.0 | 5.0 | 6.0 | 7.5 | 4.5 | 6.0 | 10 | 9.5 | 13.5 |
| ສູງສຸດແຮງບິດ (Nm) | 12 | 15 | 18 | 22 | 20 | 25 | 25 | 30 | 30 |
| ໃຫ້ຄະແນນຄວາມໄວ (r/ນາທີ) | 2500 | 2500 | 2500 | 2500 | 1000 | 1500 | 2500 | 1500 | 2500 |
| ໂຣເຕີInertia (Kg ■ m2) | 0.85 X10-3 | 1.06 X10-3 | 1.26 X10-31.53 X10-3 | 1.94X10-3 | 1.94X10-3 | 1.94 X10-3 | 2.77 X10-3 | 2.77X10-1 |
| ແຮງບິດຄ່າສຳປະສິດ(Nm/A) | 1.0 | 1.0 | 10 | 1.03 | 2.2 | 1.67 | 1.0 | 1.58 | 1.11 |
| ເຄົາເຕີEMF(V/1000r/ນາທີ) | 72 | 68 | 65 | 68 | ໑໔໐ | 103 | 70 | ໑໑໔ | 67 |
| ບາດແຜສາຍ (Q) | 2.76 | 1.84 | 1.21 | 1.01 | 27 | 1.5 | 0.73 | 1.1 | 0.49 |
| ສາຍ inductance(ມຊ) | 6.42 | 4.9 | 3.87 | 2.94 | 8.8 | 4.37 | 2.45 | 2.45 | 1.68 |
| ເວລາໄຟຟ້າຄົງທີ່(Ms) | 2.32 | 2.66 | 3.26 | 2.91 | 3.26 | 2.91 | 3.36 | 4.05 | 3.43 |
| ນ້ຳໜັກ (Kg) | 6.2 | 6.6 | 7.4 | 8.3 | 10.2 | 10.2 | 9.8 | 12.6 | 11.7 |
| ແຮງດັນຂາເຂົ້າຂອງໄດເວີ M | AC220V |
| ຈຳນວນຕົວເຂົ້າລະຫັດ (P/R) | 2500 / ປະເພດຢ່າງແທ້ຈິງ 17bit |
| ເສົາ-ຄູ່ | 4 |
| ຊັ້ນ insulation | F |
| ສະພາບແວດລ້ອມ | ອຸນຫະພູມ: -20°C~+40°C ຄວາມຊຸ່ມຊື່ນ: ພີ່ນ້ອງ^90% |
| ຫ້ອງຮຽນປົກປ້ອງ | IP65 |
| ແຮງບິດອັນດັບ (Nm) | 4 | 5 | 6 | 7.7 | 10 | 10 | 10 | 15 | | | ຕົວແບບ | 130-04025 | 130-05025 | 130-06025130-07725 | 130-10010 | 130-10015 | 130-10025 | 130-15015 | 130-15025 | | ກໍາລັງຈັດອັນດັບ (kW) | 1.0 | 1.3 | 1.5 | 2.0 | 1.0 | 1.5 | 2.6 | 2.3 | 3.8 | | ອັນດັບປັດຈຸບັນ (A) | 4.0 | 5.0 | 6.0 | 7.5 | 4.5 | 6.0 | 10 | 9.5 | 13.5 | | ແຮງບິດສູງສຸດ (Nm) | 12 | 15 | 18 | 22 | 20 | 25 | 25 | 30 | 30 | | ຄວາມໄວຄະແນນ (r/ນາທີ) | 2500 | 2500 | 2500 | 2500 | 1000 | 1500 | 2500 | 1500 | 2500 | | RotorInertia (Kg ■ m2) | 0.85 X10-3 | 1.06 X10-3 | 1.26 X10-31.53 X10-3 | 1.94X10-3 | 1.94X10-3 | 1.94 X10-3 | 2.77 X10-3 | 2.77X10-1 | | TorqueCoefficient(Nm/A) | 1.0 | 1.0 | 10 | 1.03 | 2.2 | 1.67 | 1.0 | 1.58 | 1.11 | | CounterEMF(V/1000r/ນາທີ) | 72 | 68 | 65 | 68 | ໑໔໐ | 103 | 70 | ໑໑໔ | 67 | | ບາດແຜສາຍ (Q) | 2.76 | 1.84 | 1.21 | 1.01 | 27 | 1.5 | 0.73 | 1.1 | 0.49 | | ສາຍ inductance(mh) | 6.42 | 4.9 | 3.87 | 2.94 | 8.8 | 4.37 | 2.45 | 2.45 | 1.68 | | ເວລາຄົງທີ່ໄຟຟ້າ(Ms) | 2.32 | 2.66 | 3.26 | 2.91 | 3.26 | 2.91 | 3.36 | 4.05 | 3.43 | | ນ້ຳໜັກ (Kg) | 6.2 | 6.6 | 7.4 | 8.3 | 10.2 | 10.2 | 9.8 | 12.6 | 11.7 | | ແຮງດັນຂາເຂົ້າຂອງໄດເວີ M | AC220V | | ຈຳນວນຕົວເຂົ້າລະຫັດ (P/R) | 2500 / ປະເພດຢ່າງແທ້ຈິງ 17bit | | ເສົາ-ຄູ່ | 4 | | ຊັ້ນ insulation | F | | ສະພາບແວດລ້ອມ | ອຸນຫະພູມ: -20°C~+40°C ຄວາມຊຸ່ມຊື່ນ: ພີ່ນ້ອງ^90% | | ຫ້ອງຮຽນປົກປ້ອງ | IP | | |
ທີ່ຜ່ານມາ: Milling Machine Center RTCP Milling CNC Controller ຕໍ່ໄປ: Milling Lathe CNC Controller Increment ຫຼືຕົວຄວບຄຸມຢ່າງແທ້ຈິງ