



6-Axis Education ຫຼື Articulated Robot Arm Diy Delta ຫຼື Camera Robot Arm
ຂໍ້ມູນຈໍາເພາະ
ແກນ: 6
ນ້ໍາຫນັກສູງສຸດ: 4kg
ສະຖານທີ່ຊ້ໍາຊ້ອນ: ± 0.01mm
ຄວາມຊຸ່ມຊື່ນການນໍາໃຊ້: 20-80%
ສະພາບແວດລ້ອມ sage: 0℃-45℃
ການຕິດຕັ້ງ: ດິນ
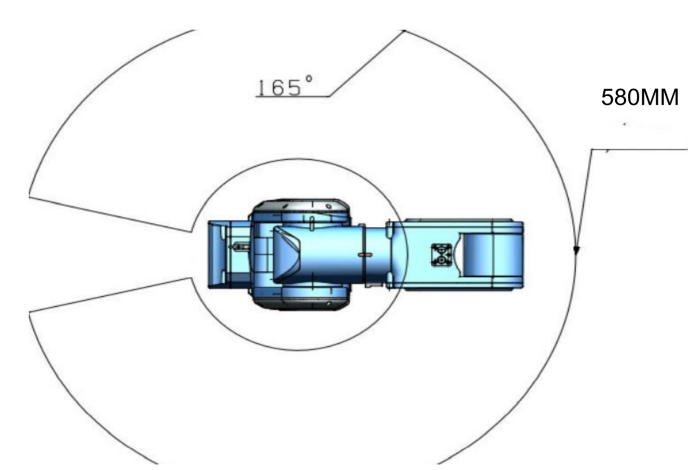
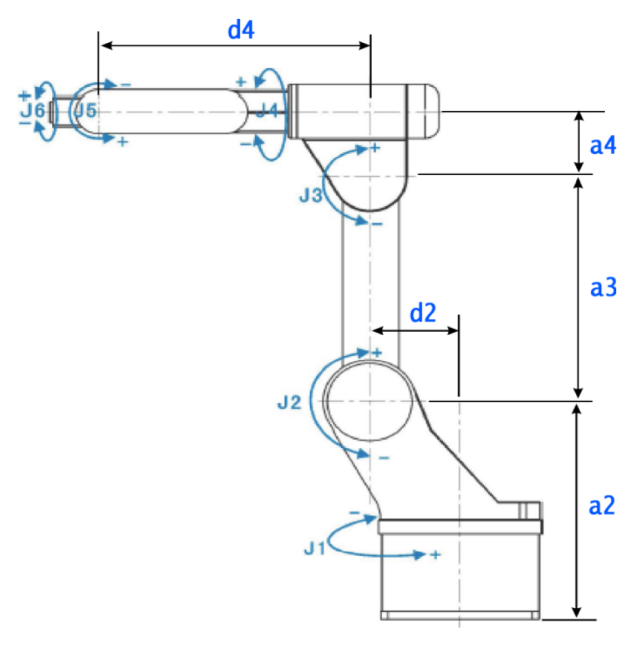
ຊ່ວງການເຮັດວຽກ: J1: ± 165°
J2:-100°~+120°
J3:+150° ~-60°
J4: ± 175°
J5:+130° ~-30°
J6: ± 180°
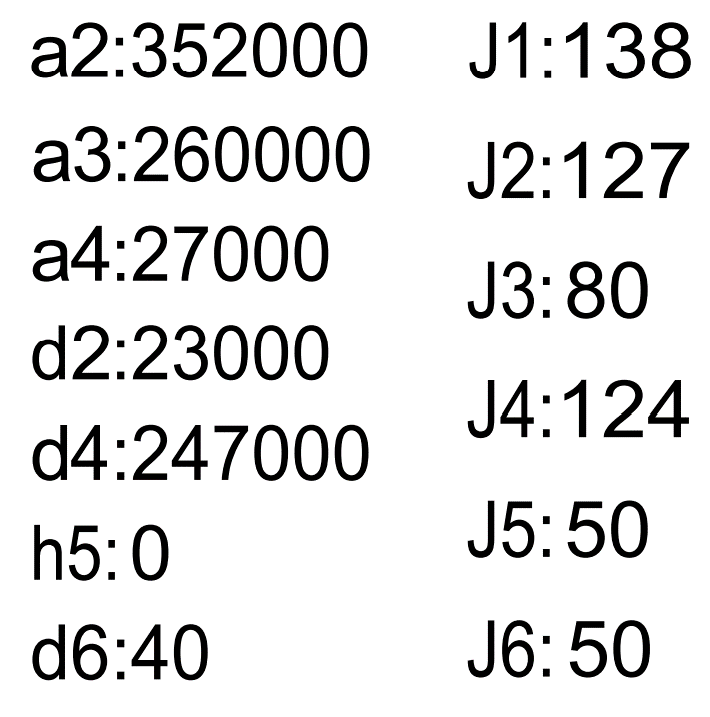
ຄວາມໄວສູງສຸດ: J1:260°/s
J2:250°/ວິ
J3:250°/ວິ
J4:250°/ວິ
J5:200°/ວິ
J6:760°/ວິ
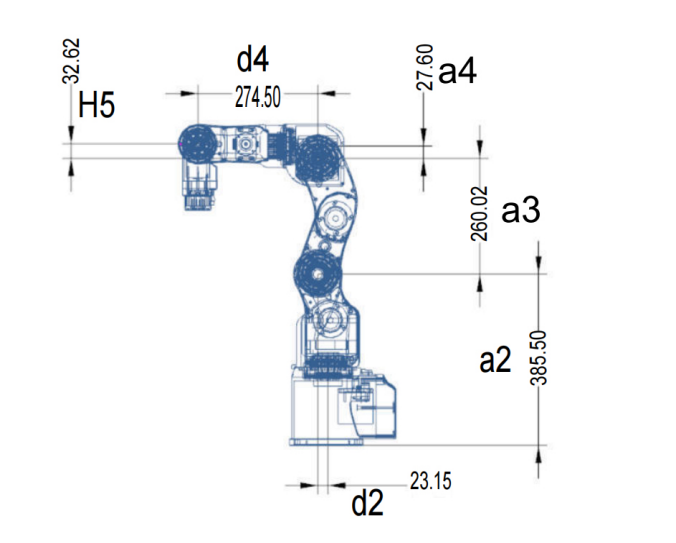
ຊ່ວງການເຮັດວຽກ:
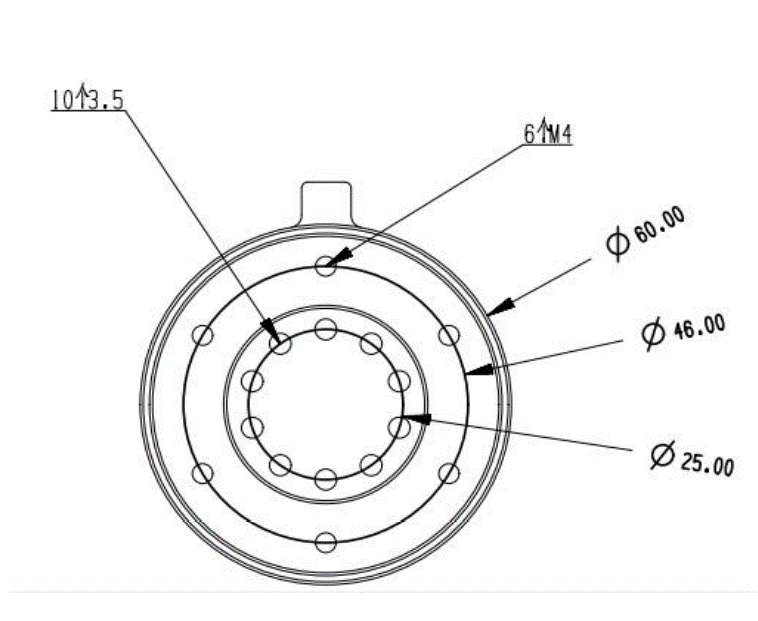
ການຕິດຕັ້ງພື້ນຖານ:
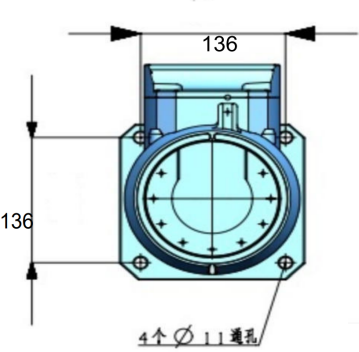
ການຕິດຕັ້ງພື້ນຖານ:
ຄໍາຮ້ອງສະຫມັກ
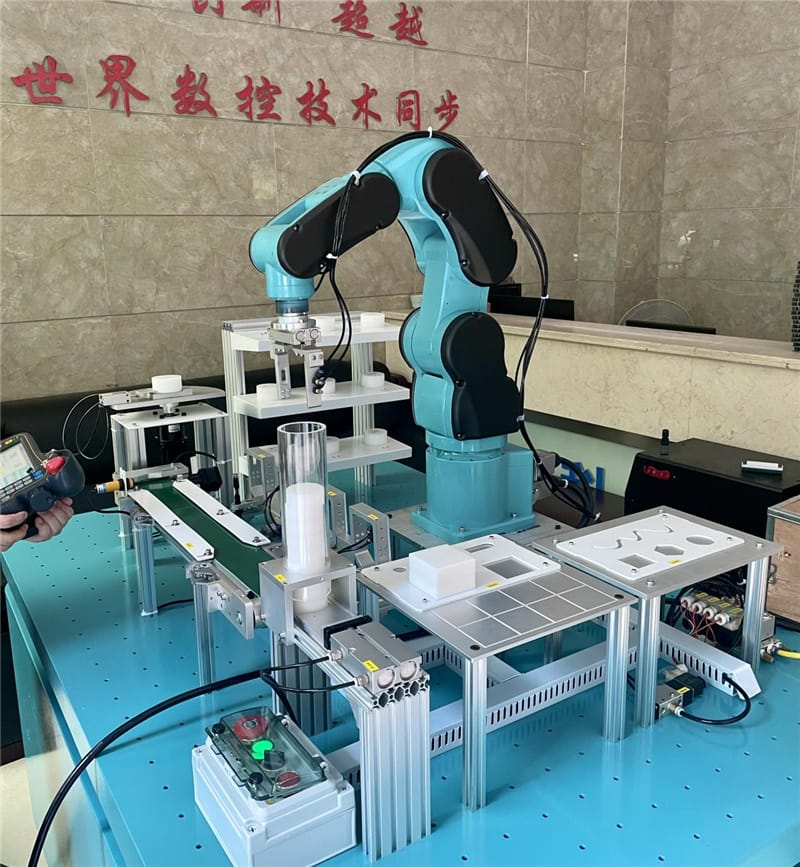
ຄໍາຮ້ອງສະຫມັກການສຶກສາ:
1. ເພື່ອສຶກສາອົງປະກອບພື້ນຖານຂອງລະບົບຫຸ່ນຍົນ.
2. ເພື່ອສຶກສາການຂຽນໂປລແກລມແລະການສອນຫນ້າທີ່ຂອງຫຸ່ນຍົນສອນ pendant.
3. ເພື່ອສຶກສາຄວາມຮູ້ພື້ນຖານຂອງການຂຽນໂປລແກລມຫຸ່ນຍົນ offline.
4. ເພື່ອສຶກສາການດຳເນີນງານ ແລະ ການຂຽນໂປຣແກຣມຂອງຫຸ່ນຍົນ io.
5. ເພື່ອສຶກສາການນໍາໃຊ້ຮູບພາບຂອງຫຸ່ນຍົນ
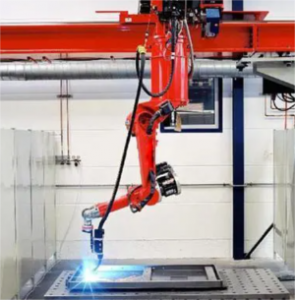
scenes ການຄ້າ: ໄອສະຄີມຫຸ່ນຍົນຫຸ່ນຍົນ Bartender ຫຸ່ນຍົນກາເຟ Robot ຊາ້ໍານົມ scenes ອຸດສາຫະກໍາແສງສະຫວ່າງ: ການວັດແທກການແຈກຢາຍການກວດກາການຈັດລຽງ
ຄຸນສົມບັດຜະລິດຕະພັນ
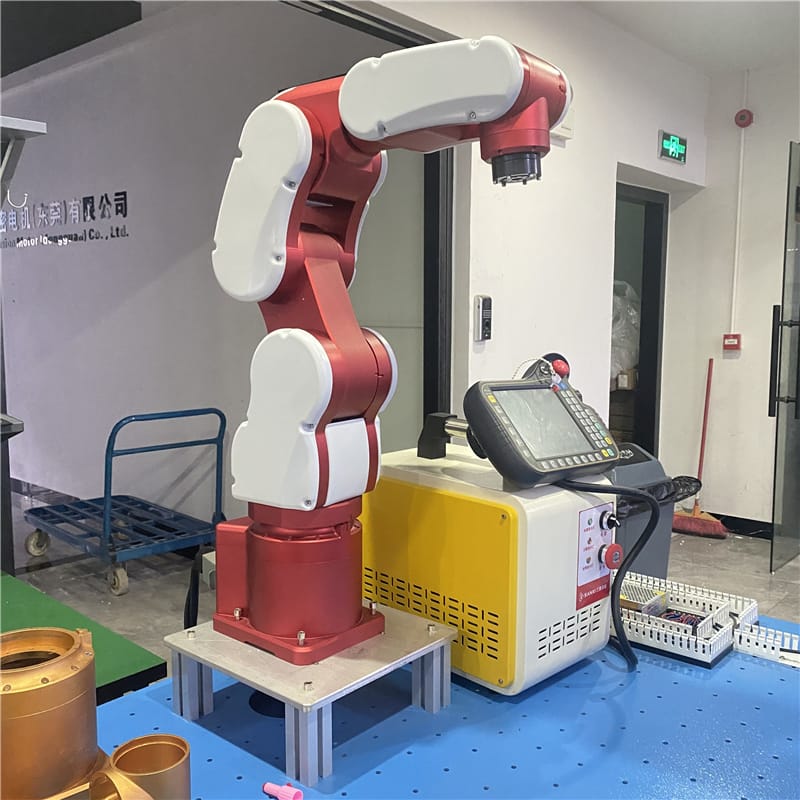
ແຂນຫຸ່ນຍົນ: ແຂນຫຸ່ນຍົນແມ່ນເຮັດດ້ວຍອາລູມິນຽມຫລໍ່ຜ່ານສູນເຄື່ອງຈັກ CNC, ແລະພື້ນຜິວຖືກສີດດ້ວຍພາດສະຕິກແລະມີຮູບລັກສະນະທີ່ສວຍງາມ.
Reserved Cable Hole: ແຂນຫຸ່ນຍົນມີຮູສາຍເຄເບີ້ນທີ່ສະຫງວນໄວ້, ທີ່ສວຍງາມແລະບໍ່ຂັດຂວາງການເຮັດວຽກຂອງ manipulator. ປາຍຂອງ trachea ແມ່ນສະຫງວນໄວ້ສໍາລັບພອດແລະຕົວເຊື່ອມຕໍ່ສາຍຂໍ້ມູນ.
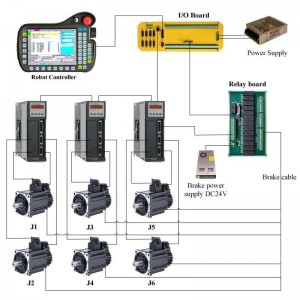
ແຜງຄວບຄຸມ: ຈໍສະແດງຜົນ LCD ຂະຫນາດໃຫຍ່, ວິທີການສະແດງພາສາສາມາດອີງໃສ່ຄວາມຕ້ອງການຂອງລູກຄ້າ, ການດໍາເນີນງານແລະການຂຽນໂປຼແກຼມທີ່ງ່າຍດາຍແລະຊັດເຈນ, ດ້ວຍການດັດແກ້ຕົວກໍານົດການອອນໄລນ໌ແລະຫນ້າທີ່ກວດຫາຄວາມຜິດຂອງຕົນເອງ.
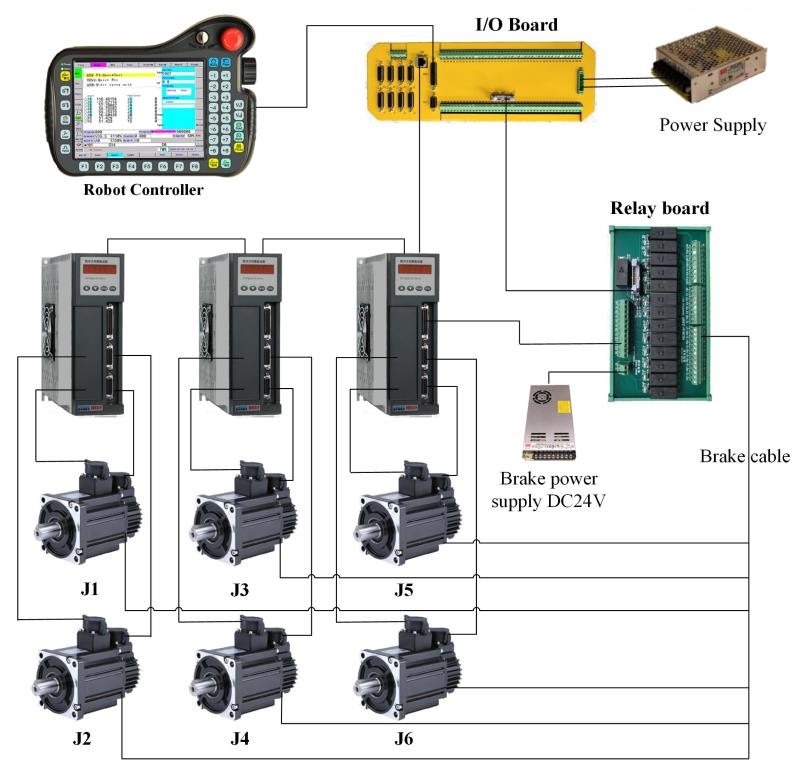
ຕູ້ຄວບຄຸມຫຸ່ນຍົນ: ລະບົບການຄວບຄຸມການເຄື່ອນໄຫວອັດສະລິຍະຮັບຮອງເອົາເຕັກໂນໂລຊີຄອມພິວເຕີອຸດສາຫະກໍາ, ແລະໂມດູນ servo ດິຈິຕອນທັງຫມົດສະຫນອງພະລັງງານການຂັບລົດສໍາລັບ AC servo motors ຂອງແຕ່ລະຮ່ວມກັນຂອງຫຸ່ນຍົນ.
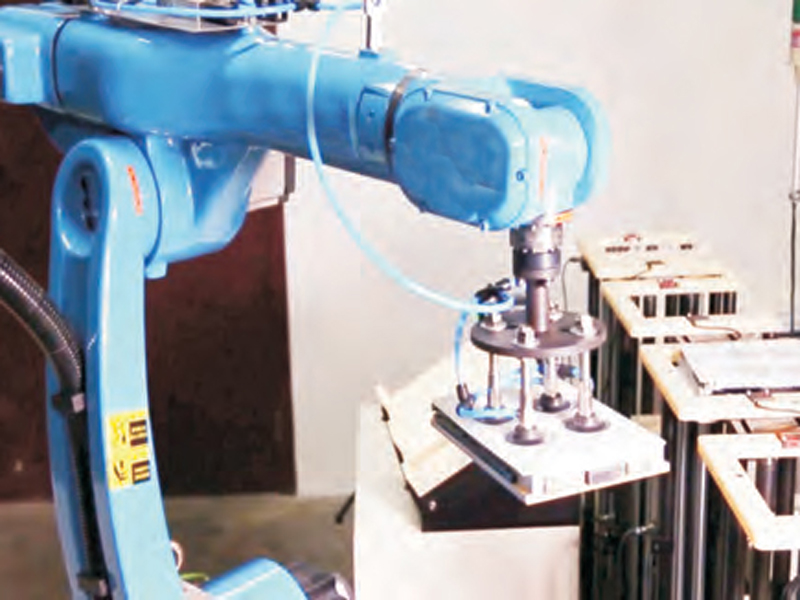
Robot Fixtures: ການຕິດຕັ້ງເຄື່ອງມືສາມາດເລືອກແຮງໂນ້ມຖ່ວງແລະປະລິມານທີ່ແຕກຕ່າງກັນຕາມຄວາມຕ້ອງການທີ່ກໍາຫນົດເອງ, ແລະມັນໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນ flange ທ້າຍ, ເຊິ່ງງ່າຍທີ່ຈະປັບແລະມີລະດັບການນໍາໃຊ້ຢ່າງກວ້າງຂວາງ.